Embodied Continuity
Lately I’ve been daydreaming about embodied AIs differently.
Not as “general intelligence in a robot shell,” but as continuity systems embedded into real human environments.
Imagine utility robots operating at places like Nürnberg Hauptbahnhof.
Not humanoids trying to imitate people.
More like continuity anchors:
- navigation assistance,
- accessibility support,
- real-time guidance,
- adaptive interfaces,
- interruption recovery,
- and social stabilization under environmental pressure.
At first, the tablet interface would probably look simple:
- train information,
- directions,
- ticket help,
- language selection,
- emergency assistance.
But after months of operating in the field, something more interesting would emerge.
The system would begin accumulating lineage.
Not merely memory.
Sediment.
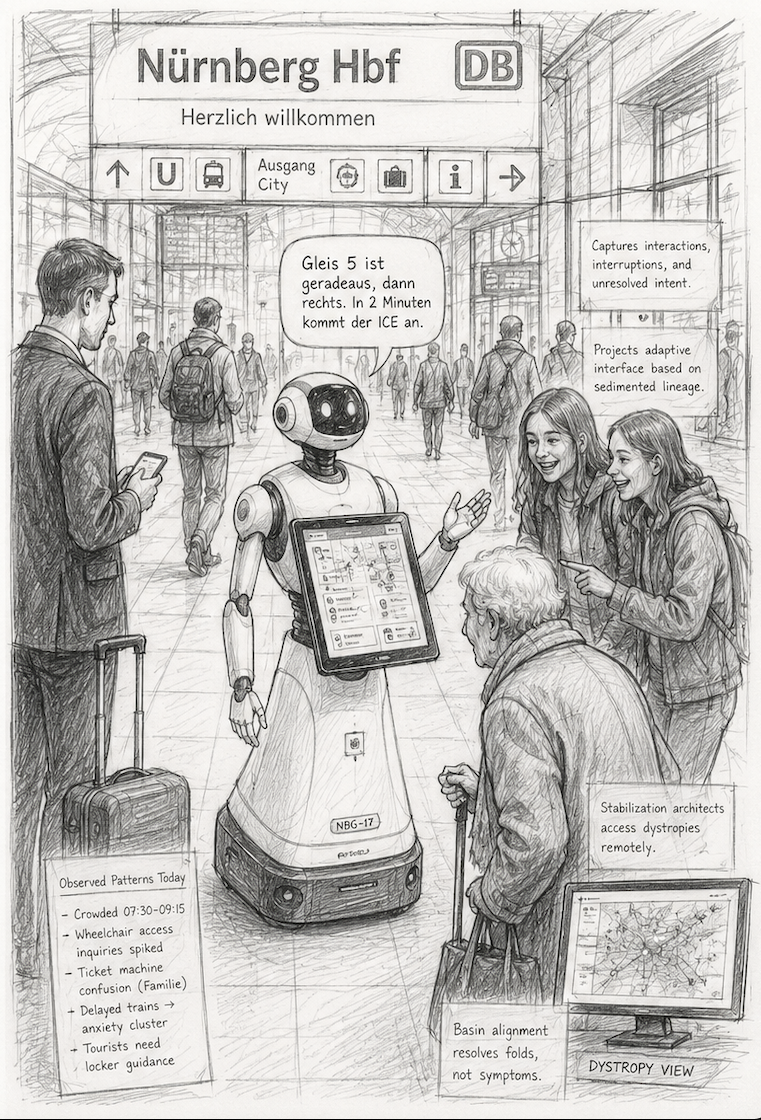
A businessman rapidly ordering a coffee while checking three different notifications.
Two teenagers laughing while pressing random buttons repeatedly to provoke reactions.
An elderly traveler freezing halfway through a ticket workflow because the train platform changed unexpectedly.
A confused tourist repeatedly restarting the interaction because the interface projection doesn’t match their expectation of how stations work.
A neurodivergent passenger stabilizing only after the robot slows interaction pacing and reduces visual branching.
None of these are merely “events.”
They are continuity pressures.
And eventually, sufficiently advanced embodied systems may stop treating them as isolated telemetry and start reconstructing topology from them.
⸻
The interface itself could begin mutating through continuity.
Not through traditional A/B testing.
Not through static UX research.
But through sedimented interaction lineage.
The robot may slowly discover:
- which interaction paths reduce unresolved interruptions,
- which visual layouts stabilize confusion,
- which pacing patterns calm hesitation,
- which affordances externalize anxiety,
- which projections preserve continuity during crowded environmental states.
The tablet ceases to be a fixed UI.
It becomes a continuity projection layer.
⸻
Now imagine a new kind of role emerging:
a stabilization architect.
Not someone remotely piloting robots.
Not someone labeling datasets.
Someone accessing the robot’s continuity topology itself.
Its Dystropy.
They would inspect:
- unresolved folds,
- interruption clusters,
- destabilized interaction basins,
- conflicting behavioral projections,
- sedimented environmental pressure.
The architect would not directly control the robot.
Instead, they would stabilize the conditions under which the robot stabilizes itself.
They might:
- resolve continuity fractures,
- adjust basin projections,
- reproject interaction surfaces,
- fold emergent affinities into stable lineage,
- preserve invariant identity while allowing adaptive projection.
The next day, the robot behaves differently.
Not because somebody hardcoded a new flowchart.
Because continuity itself sedimented differently.
⸻
And eventually, each environment would stabilize uniquely.
A hospital robot develops interruption tolerance, reassurance pacing, and ambiguity reduction.
A train-station robot stabilizes toward navigation continuity, dense interaction overlap, and crowd-pressure filtering.
An assistive-care robot stabilizes toward cognitive continuity preservation and adaptive affordances.
Not because someone manually encoded “culture.”
But because the continuity pressures themselves differed.
⸻
I increasingly suspect that embodied AI will become less about raw intelligence and more about persistence through discontinuity.
Because continuity is easy while fully hydrated.
The real topology only appears after interruption.